Modulo camera 是怎麼運作的呢?首先,一般數位相機的感光元件,每個像素都有一定的飽和能力,每一個像素就像一個杯子,在吸收到光線過多時,就像一個杯子裝版就無法再裝一樣,就算有 500cc 但杯子只能裝 100cc 就還是只能得到 100cc 的量;像素如果達到飽和狀態,那就會呈現純白色。
餘數相機採用的方法,是在飽和以後自動歸零,取其倍數與餘數來計算進光量,也就是一個杯子可以在裝滿之後倒掉再裝,變成 500cc 等於五次的 100cc,因此一個像素不只能測 0~100(假設飽和為 100),還可以測超過 100 以上的光。
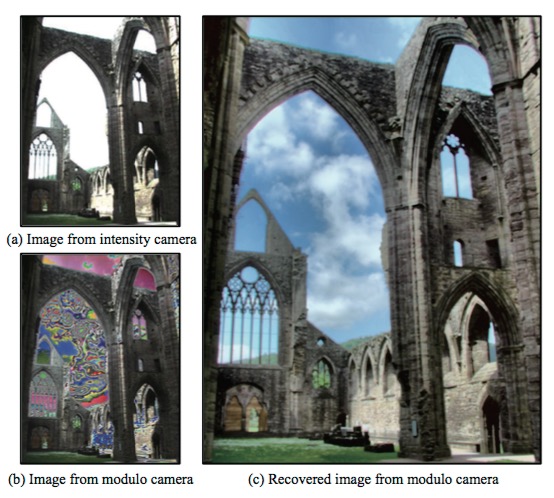
如果今天在攝影時,單一像素接收到 280 的光,那麼在達到 100 的時候會自動重新計算,280 就需要重置兩次,最後得到 2 餘 80 的值。然後系統會根據這個值回推這個過曝的部位應該還原成什麼顏色。以上面這張圖為例,圖 a 是採用一般相機拍攝出來的成果,可以看到背景的天空部位過曝呈現白色。但圖 b 的餘數相機會主動針對過曝的部位進行再計算,最後還原成圖 c 的照片,把藍天白雲還回來,照片因此更加美觀。
這種作法,有點像是 HDR 再過曝的部位採用低曝值來疊合,低曝部位採用高曝值來疊合一樣,因此,餘數相機這種技術也可以被稱為一種新的 HDR。但是 HDR 的做法是快速拍攝兩張不同曝光值的照片,用兩張照片來疊合,但是在某些情境下是無法快速得到兩張照片的,像是手震、動態攝影等,餘數相機只需要取像一次,就可以完成 HDR 般的成果,很適合用在科學研究、工業、無人空拍、甚至軍事等需求。以下影片有更多餘數相機實際測試的範例,看起來還有些色差改進的空間,但已經很厲害了。
資料來源:Image resource